π*₀.₆: a VLA That Learns From Experience
Physical Intelligence · arXiv 2511.14759 · 2025-11-19
π*₀.₆ 不是又一个新架构——它是 π₀.₅ 的"实习医生升级": π₀.₅ 学会了怎么在新家干活(imitation learning),但不会从自己的失败里改进; π*₀.₆ 加上了"从经验里学"的回路——叫 RECAP (RL with Experience and Corrections via Advantage-conditioned Policies)。
阅读路径:先看 §2 三代关系(π₀.₅ / π₀.₆ / π*₀.₆ 三个名字别搞混), 再看 §3 RECAP 算法(一张 Fig 1 + 一张 Algorithm 1 总览), §4–§5 是真正新的方法(distributional VF + 优势条件), §7–§8 是真实场景结果(13 小时连续做咖啡、两小时折叠新衣服)。
§1 它在 π₀.₅ 之上多解决了什么
π₀.₅ 已经把"在新家 zero-shot 干活"做出来了——但论文里多数任务的成功率仍在 60–80%, 速度也比不过人类。本质问题是:纯模仿学习的天花板就是示教质量, 老师不会的、老师做错的,模型都学不到。 π*₀.₆ 直接面对下一个 open question—— VLA 能不能靠自己 deploy 时的经验持续提升?
用 RECAP 训练的 π*₀.₆ 模型,可以在真实家里折叠各种衣物、 在真实工厂场景里组装纸箱、用专业意式咖啡机做双份 espresso。 最难的任务上,RECAP 让吞吐量翻倍以上,并把失败率大约减半。
展开原文 · Abstract 核心句
"We present a general-purpose method, RL with Experience and Corrections via Advantage-conditioned Policies (RECAP), that provides for RL training of VLAs via advantage conditioning. Our method incorporates heterogeneous data into the self-improvement process, including demonstrations, data from on-policy collection, and expert teleoperated interventions provided during autonomous execution."
LLM 的发展路径是:pre-train(读万卷书)→ SFT(学着回答)→ RLHF(按反馈改进)。 VLA 现在走的是同一条路:π₀(pre-train + flow matching)→ π₀.₅(co-train + 高层推理)→ π*₀.₆(RL from experience + corrections)。 RECAP 在 VLA 里的位置 ≈ RLHF 在 LLM 里的位置——都是把"行动后果"变成可优化的反馈。
§2 三代关系 · π₀.₅ → π₀.₆ → π*₀.₆
读这篇论文最容易混淆的就是三个名字:π₀.₅(旧)、π₀.₆(新基模型)、π*₀.₆(带 RL 的最终模型)。 上一节说了 RECAP 是"怎么学";这一节先把"谁在学"和"从哪起步"搞清楚—— 后面所有公式才有意义。
2.1 三代差异对照
| 代际 | π₀.₅(2025-04) | π₀.₆(2025-11,model card) | π*₀.₆(本论文) |
| 骨干 VLM | PaliGemma(SigLIP + Gemma 2.6B) | SigLIP 400M + Gemma 3 4B | 同 π₀.₆ |
| Action Expert | ~300M flow matching | 860M flow matching | 同 π₀.₆ |
| 训练范式 | imitation learning(两阶段:discrete → flow) | 同 π₀.₅(更大数据) | + offline RL · advantage conditioning |
| 额外条件 | language + state + images | 同 π₀.₅ | + "Advantage: positive/negative" 文本 token |
| 数据来源 | 异质机器人 + web + 高层 subtask 标注 | + 更多机器人本体 | + autonomous rollouts + human interventions |
| 价值函数 | 无 | 无 | 670M VLM 骨干 + 离散 distributional value head |
| 典型成果 | 新家 zero-shot 干 10–15 min | 新基线(详见独立 model card PDF) | 13h 连续做 espresso · 工厂组装纸箱 · 折新衣物 2x throughput |
带星号 π* 在论文里专指引入了 advantage conditioning 的版本—— 没星号的 π₀.₆ 只是"更大的 π₀.₅",不会做 RL。 后面所有方法章节谈的都是 π*₀.₆。
🔍 关于 π₀.₆ 的来源:它不在 arXiv,所以按"论文"搜不到—— PI 在 2025-11-17 单独放出了一份 PDF 形式的 model card: PI06_model_card.pdf。 π*₀.₆ 主论文的参考文献 [6] 就是引用的它("Physical Intelligence Team. π0.6 model card. 2025")。 架构、训练数据、推理速度(H100 上 63ms / chunk)等细节全部出自这份 model card。
2.2 为什么需要 RL · 模仿学习的天花板
§2.1 列了三代差异——但为什么非要在 π₀.₆ 头上再叠一层 RL? 这一小节给两个理由,下一章 §3 直接讲怎么做。
| 问题 | imitation learning 的硬伤 |
| compounding error | 训练时只看到"专家轨迹"。一旦 deploy 时漂出训练分布,模型不知道怎么"回到正轨"——错误会沿时间累积(Ross & Bagnell 2011)。 |
| 速度 / 鲁棒性 | 模型最多复现示教质量。示教者本身慢、或经常犹豫,模型就学不到比示教者更快的执行。 |
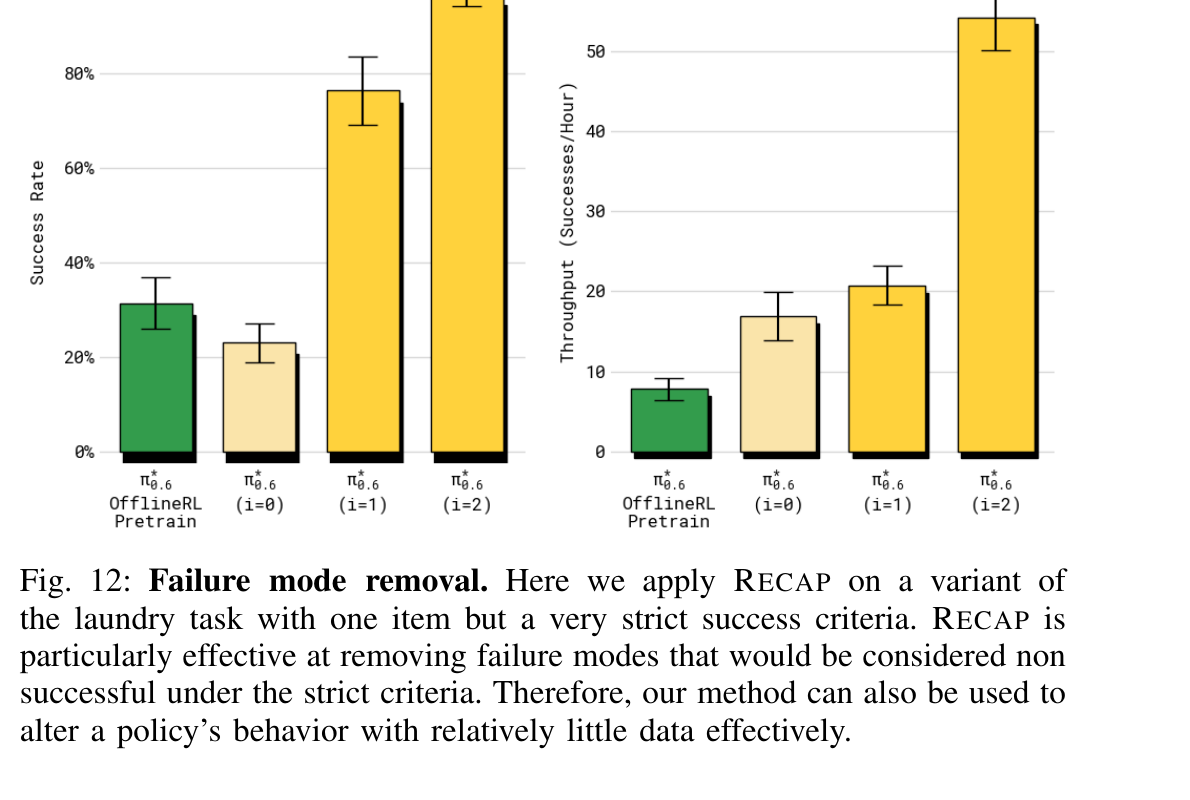
| 失败模式无法定向修复 | "把 collar 折反了" 这种特定失败,加再多示教也不一定覆盖到。RL 只要用含失败的 rollouts就能精准压制(见 §8.4 Fig 12)。 |
§3 RECAP 算法总览
§2 给出了"需要 RL"的动机。这一节用一张 Fig 1 + 一张 Algorithm 1 把 RECAP 的整套流水线讲完——后面 §4 / §5 只是放大它的两个核心齿轮。
3.1 一张图看懂 RECAP
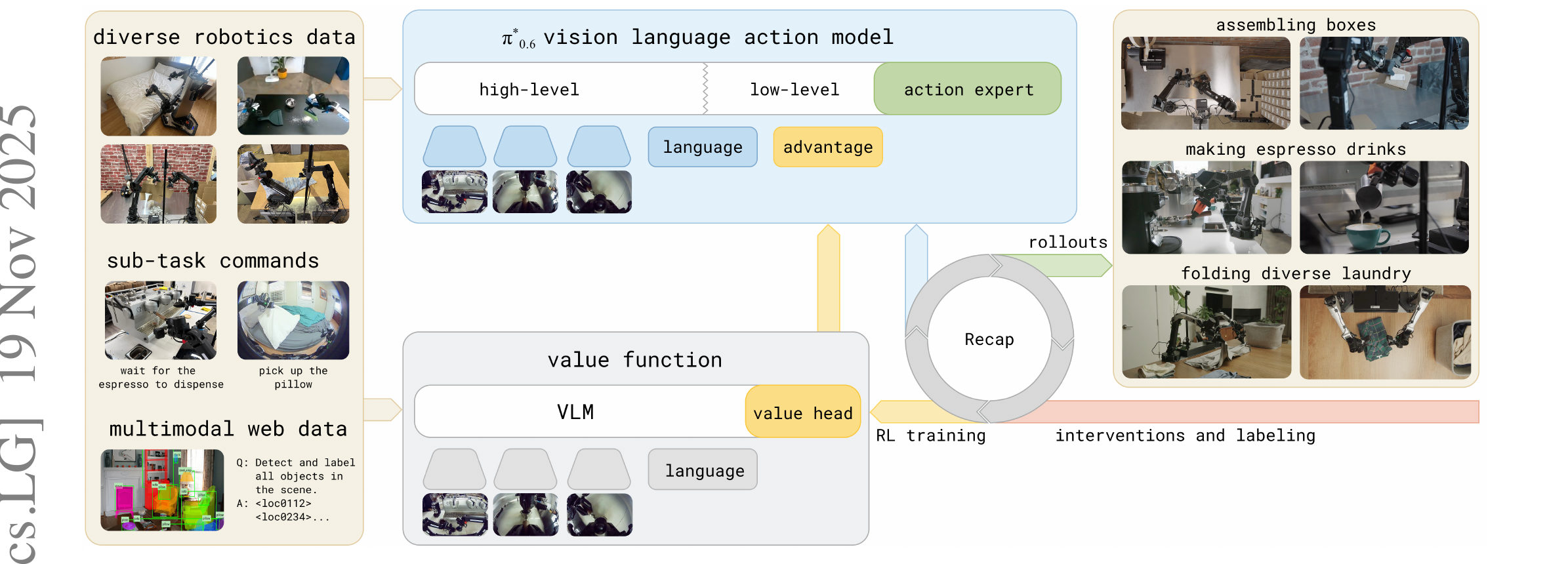
3.2 三件子任务 · Algorithm 1
论文把 RECAP 切成三个可重复调用的子例程,循环 K 次。 每一次循环就是"跑数据 → 训 VF → 训 policy"——和 actor-critic 套路一样, 但policy 训练用的不是 policy gradient,是 supervised learning + advantage 条件。
Require: 多任务示教数据集 D_demo
# ─── Pre-training 阶段 ───
1: 用 D_demo 训 V_pre # 价值函数预训练(Eq.1)
2: 用 D_demo + V_pre 训 π_pre # 策略预训练(Eq.3)
# ─── 对每个下游任务 ℓ 单独跑 ───
3: 初始化任务阈值 ε_ℓ # 控制"什么算优势 > 0"
4: 用任务示教 D_ℓ 微调 V_ℓ⁰(从 V_pre 开始) # SFT 价值函数
5: 用 D_ℓ + V_ℓ⁰ 微调 π_ℓ⁰(从 π_pre 开始) # SFT 策略
# ─── RECAP 迭代 K 次 ───
6: for k = 1 to K do
7: 用 π_ℓ^(k-1) 在真机上 rollout,加进 D_ℓ # autonomous + interventions
8: 用 D_ℓ 微调 V_ℓ^k # 重新训 VF
9: 用 D_ℓ + V_ℓ^k 微调 π_ℓ^k # 重新训 policy
10: end for第 1 步:拿到 demo 数据
D_demo 来自异质机器人 + web 多模态 + sub-task 标注(和 π₀.₅ 一样)。
第 2 步:先把 V 训出来
独立的 670M VLM + value head。Loss 是 Eq.1 的 cross-entropy on discretized returns。
第 3 步:用 V 训 policy(pre-training 的 π_pre)
Loss 是 Eq.3:log π(a|o,ℓ) + α·log π(a|I,o,ℓ)。I = 1{A(o,a) > ε} 就是把"动作够不够好"压成 0/1。
第 4 步:去真机跑,把 rollouts 加进数据集
自主跑大部分 + 人偶尔介入纠正。介入数据强制标 I=True(人当然是好的)。
第 5 步:循环 7–9 行
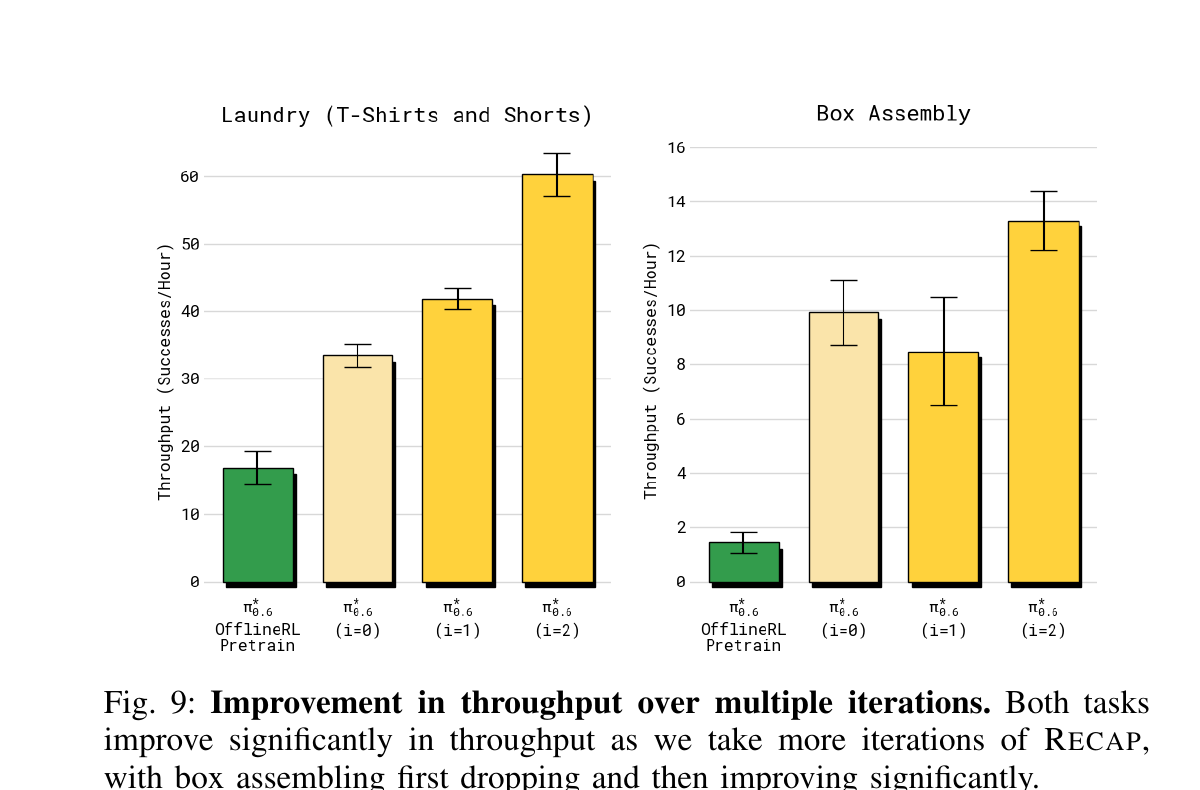
实测 K=2(box assembly)就足够;laundry K=1 已接近饱和。每次循环 = 一次"实习 → 总结 → 再实习"。
没有 PPO、没有 REINFORCE、没有 policy gradient。 策略训练的损失始终是监督学习的 NLL——只是把"这个动作好不好"当成额外的 prompt喂进去。 训练时随机出现 positive / negative 两种条件;推理时永远 condition on positive,相当于 classifier-free guidance(CFG)的"开关"。
§4 价值函数 · Value Function
§3 把 RECAP 的整体框架讲完了——但"价值函数"和"优势函数"具体长什么样没说。 VF 是这套流水线里的"裁判",VF 不准,advantage 就是噪声,policy 越训越糟。 这节回答:用什么 reward?怎么离散化?为什么用 distributional VF 而不是回归一个标量?
4.1 离散化 + 多任务 distributional VF
一句话:每多走一步扣 1 分;成功不罚;失败重罚。 所以 Vπ(o) = "从这里走到成功还要负多少步",归一化到 (-1, 0]。
论文走 Bellemare 2017 distributional RL 的路线:把回报离散成 B = 201 个 bin, VF 输出每个 bin 的概率,loss 是 cross-entropy。 连续回归一个 scalar 容易被极端值(fail 时的 -Cfail)拖着不收敛; 分布预测对长尾稳定得多,并且天然给出 uncertainty。
- $R^B_t(\tau)$
- "从 $t$ 到轨迹结束的真实回报" 离散到 $B = 201$ 个 bin 的 one-hot 分布——这就是 ground truth
- $p_\phi(V \mid o_t, \ell)$
- VF 网络输出的"V 值在 B 个 bin 上的概率分布"
- $H(\cdot, \cdot)$
- cross-entropy——拉近预测分布和 ground-truth one-hot
- $\mathbb{E}_{\tau\sim\mathcal{D}}$
- Monte Carlo 估计:直接用整条轨迹的真实回报,不做 TD bootstrap
论文承认这不如 off-policy Q-function 优秀,但简单稳定,未来工作可以换。
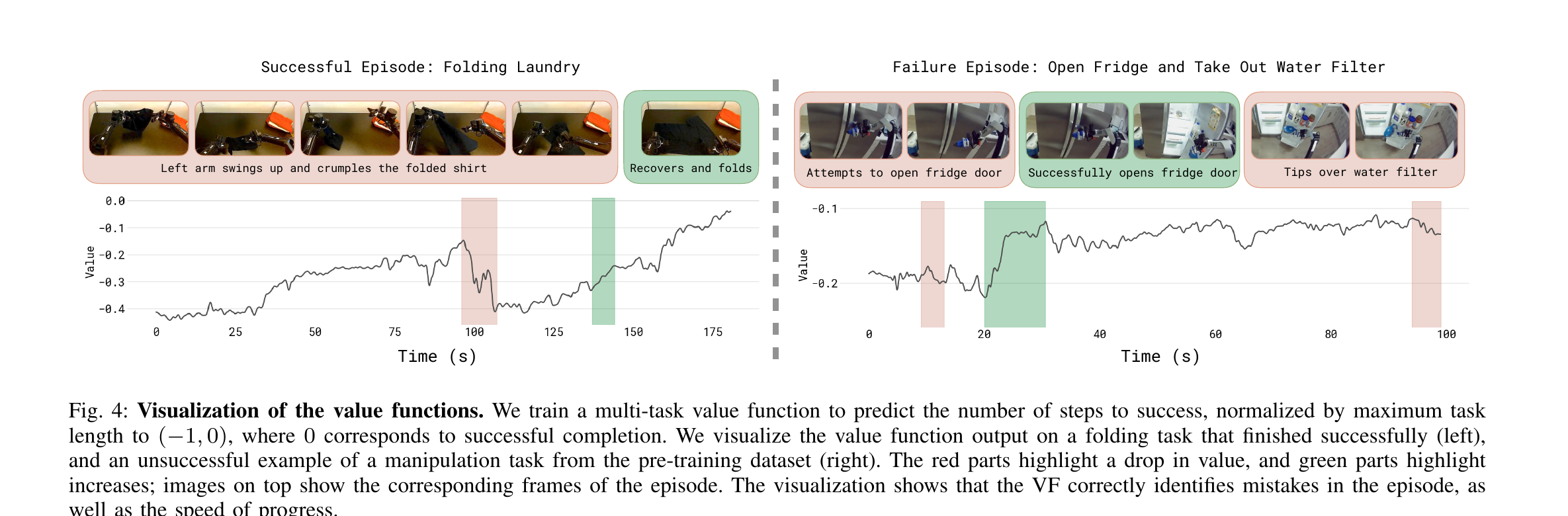
4.2 VF 学到了什么(Fig 4)
§5 优势条件策略提取
§4 把"裁判"训出来了。下一个问题是:有了 V,怎么把策略变好? 正常 RL 的答案是 PPO / Q-learning——但 flow matching VLA 没有可计算的 log-likelihood, 那些方法都用不了。RECAP 用的是第三条路:把"动作好不好"当 prompt 的一部分。
5.1 为什么不能直接 PPO / AWR
| 方法 | 用在 flow matching VLA 上的硬伤 |
| PPO / REINFORCE | 需要 log π(a|o)。Flow matching 是 ODE/SDE 形式,没有 closed-form likelihood。论文 Appendix D 给了一个用 single-step diffusion ELBO 的近似(PPO baseline),但实测不稳定且性能差(Fig 11)。 |
| AWR(advantage-weighted regression) | 对样本按 exp(A/β) 加权——负优势的样本权重 ≈ 0,等于扔掉一大半数据。VLA 训练成本极高,扔数据是奢侈。 |
| RECAP(advantage conditioning) | 所有数据都参与 SL 训练,只是多个 binary 文本 token 标"好/坏"。推理时 condition on "好"——等价于 classifier-free guidance 的一种实现。 |
5.2 优势条件的数学
从经典 regularized RL 的闭式解出发,论文证明改进策略 π̂ 可以写成:
- $I = \mathbb{1}\{A^{\pi_\text{ref}}(o, a, \ell) > \varepsilon_\ell\}$
- binary 改进指示符——动作 $a$ 的优势是否超过阈值 $\varepsilon_\ell$
- $\pi_\text{ref}(a \mid I, o, \ell)$
- 多 condition 一个 $I$ 的"打了好坏标签的"参考策略
- $\beta = 1$
- $\hat\pi = \pi_\text{ref}(a \mid I, o, \ell)$——直接 condition on $I=\text{True}$ 就是改进策略
- $\beta > 1$
- 进入 CFG(classifier-free guidance)模式,推理期"放大" advantage 信号
两项都是纯 NLL——一项是无条件的(用作 ref policy),一项是有 advantage 条件的(用作改进 policy)。 实践上不调 α,而是30% 概率随机丢掉 I 这个 token——这就是 CFG 风格的 dropout,等价 α = 1。
5.3 工程实现 · "Advantage: positive" prompt
把 advantage 条件做成额外的文本 token,插在 prompt 末尾、动作之前:
... <language> ... <state> ... <subtask> ... Advantage: positive [actions]这样既不动模型架构,也不动 tokenizer——VLM 见过的"positive / negative" 文本足够把语义带过来。 训练时 30% dropout(无 advantage token),推理时永远填 "positive"。
Diffusion 图像生成里 CFG 的做法是:训练时随机丢掉 prompt(一定概率走 unconditional), 推理时用 ε(x|prompt) - ε(x|∅) 的差去"放大 prompt 信号"。 RECAP 把"prompt" 换成"advantage 是 positive"——一模一样的把戏,只是把"条件"从描述换成奖励标签。
§6 模型架构
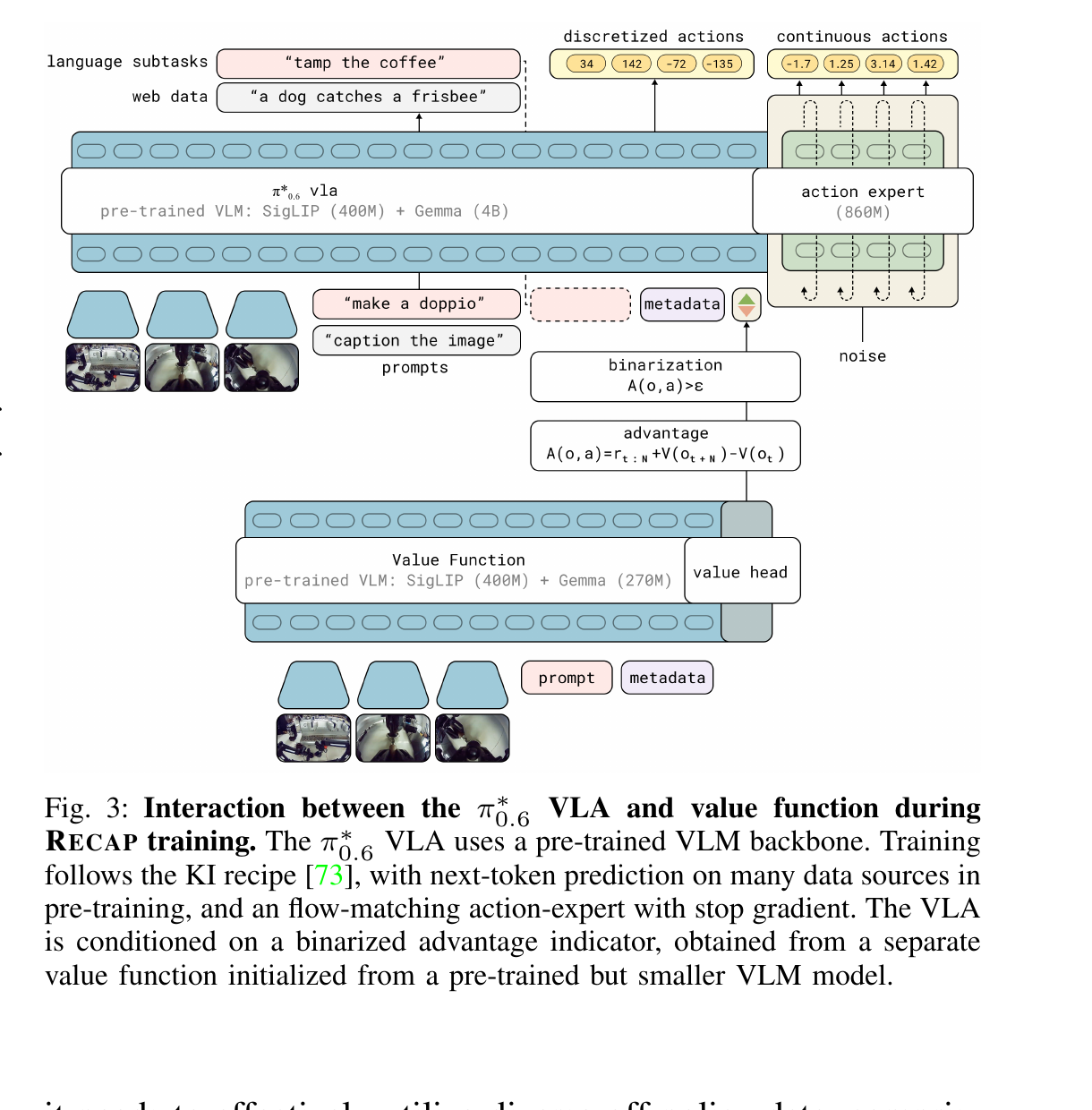
§3–§5 讲完了"训练时怎么用 VF + advantage"。这节回答"VLA 和 VF 这两个模型在物理上长什么样、怎么联动"——只看 Fig 3 一张图就够。
6.1 VLA + VF 联动(Fig 3)
6.2 π₀.₆ 相比 π₀.₅ 改了什么
| 组件 | π₀.₅ | π₀.₆ |
| VLM 骨干 | PaliGemma(SigLIP 400M + Gemma 2.6B) | SigLIP 400M + Gemma 3 4B(model card) |
| Action Expert | ~300M flow matching | 860M(约 3×) |
| 训练范式 | discrete pre-train → flow post-train(KI) | 同 KI |
| Pre-training 数据 | 多机器人 + web + HL subtask | + 更多机器人本体 |
| 新增(仅 π*₀.₆) | — | + advantage 文本 token + 独立 VF 模型 |
§7 任务 & 机器人
§3–§6 都是方法论。从这节开始进入"在哪里、做什么"—— 选了三类真实世界长程任务来验证 RECAP 是否真的能 work,而不是只在 sim 里好看。
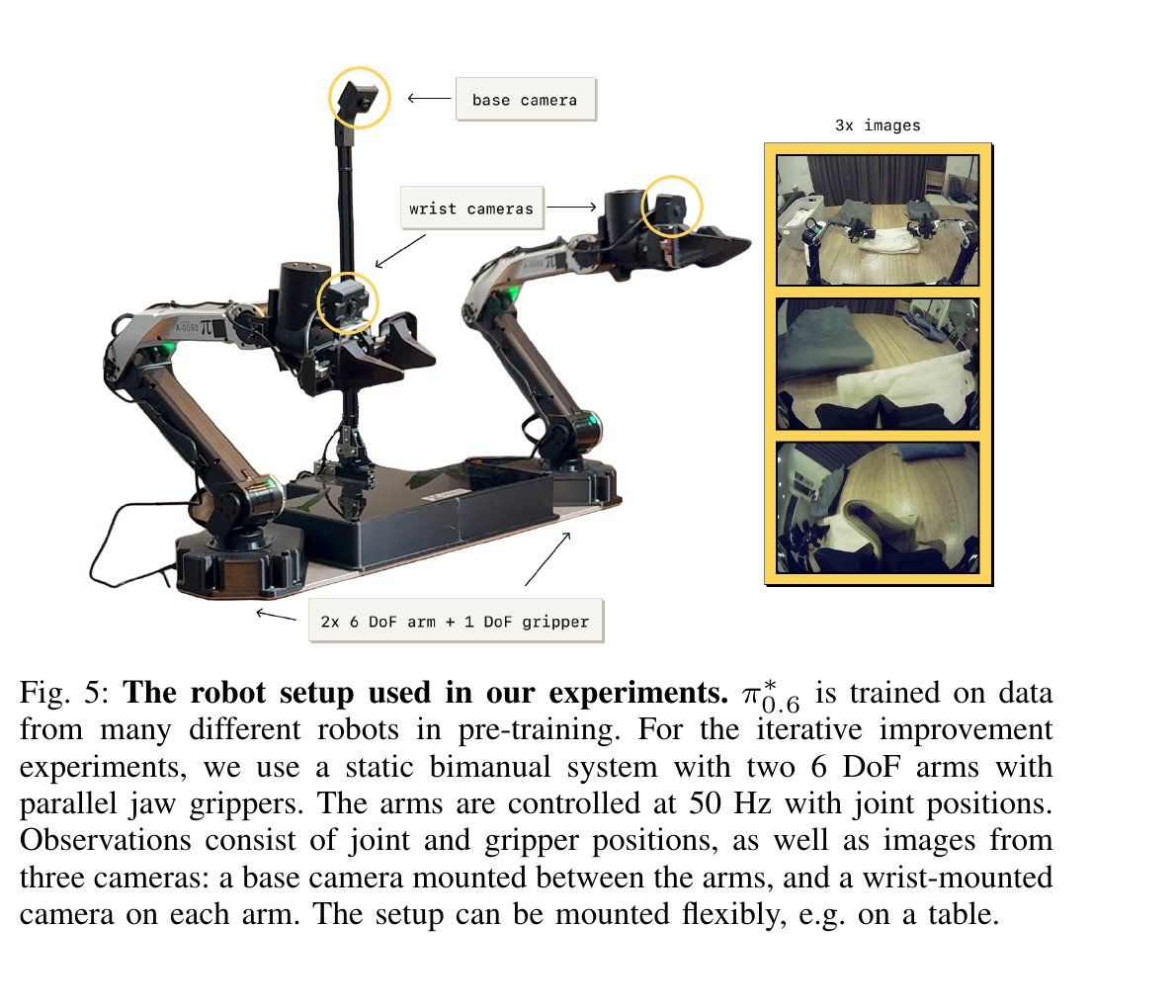
7.1 双臂平台(Fig 5)
7.2 三类任务(Fig 6)
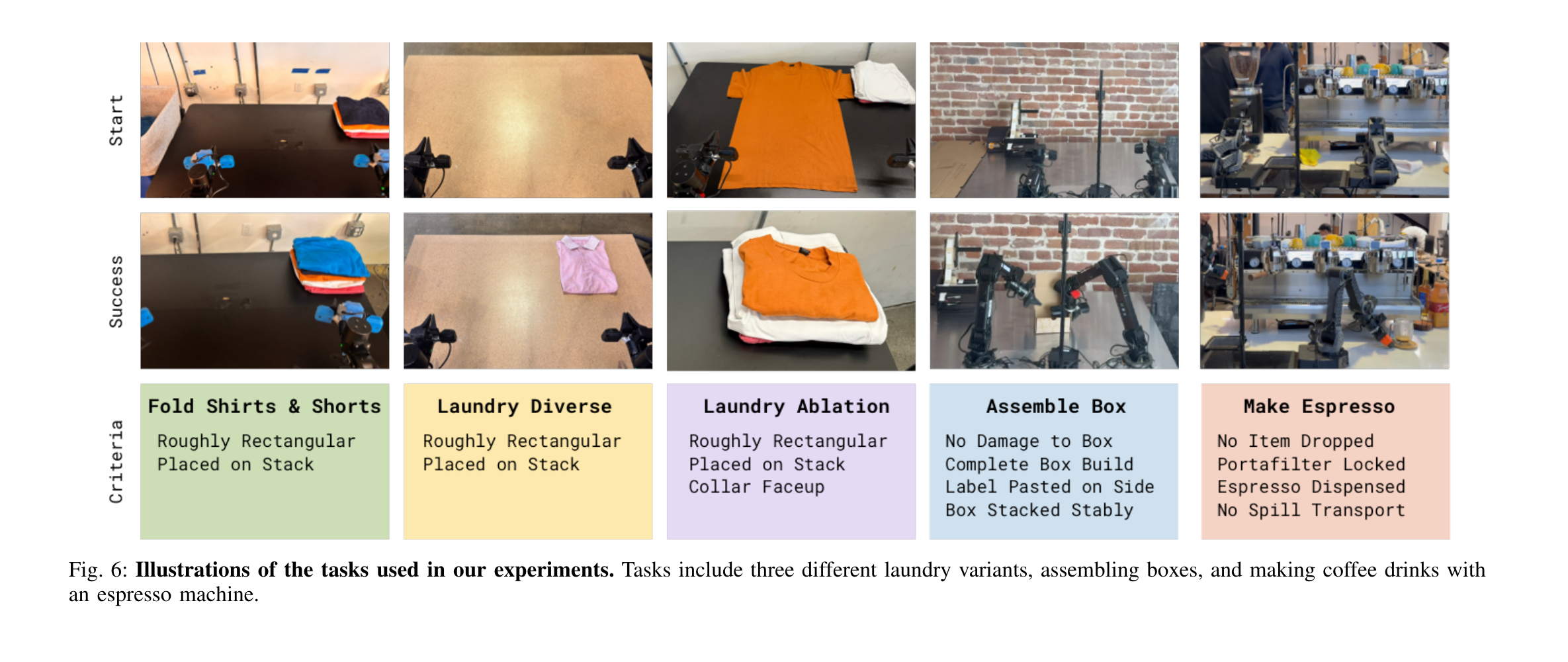
| 任务 | 成功标准 | 难点 |
| Fold T-shirts & Shorts | 大致矩形 + 叠到指定堆位 | π₀ 时代就在做的基线任务,速度是关键 |
| Laundry Diverse(11 类) | 同上,但物品种类多(毛衣、袜子、内衣...) | 形变物体多样性大,最难的是 button-up shirt |
| Laundry Ablation | 橙色 T 恤 + collar 必须朝上 | 故意放在容易出"collar 朝下" 失败模式的初始姿态 |
| Assemble Box | 从纸板片 → 组装 → 贴 label → 入箱 | 真实工厂 deployment;需要受力操作 + 多步骤协调 |
| Make Espresso (Cafe) | 取 portafilter → 磨豆 → 压粉 → 锁机 → 萃取 → 端送,<200s | 商业咖啡机;液体 + 受力 + 长程 |
§8 实验结果
§7 描述了"在哪做"。这节用四张图回答四个具体问题: RECAP 比 baseline 强多少?多次迭代有没有持续提升?比 AWR / PPO 强多少?能不能定向修掉某个失败模式?
8.1 吞吐量 + 成功率(Fig 7 / Fig 8)
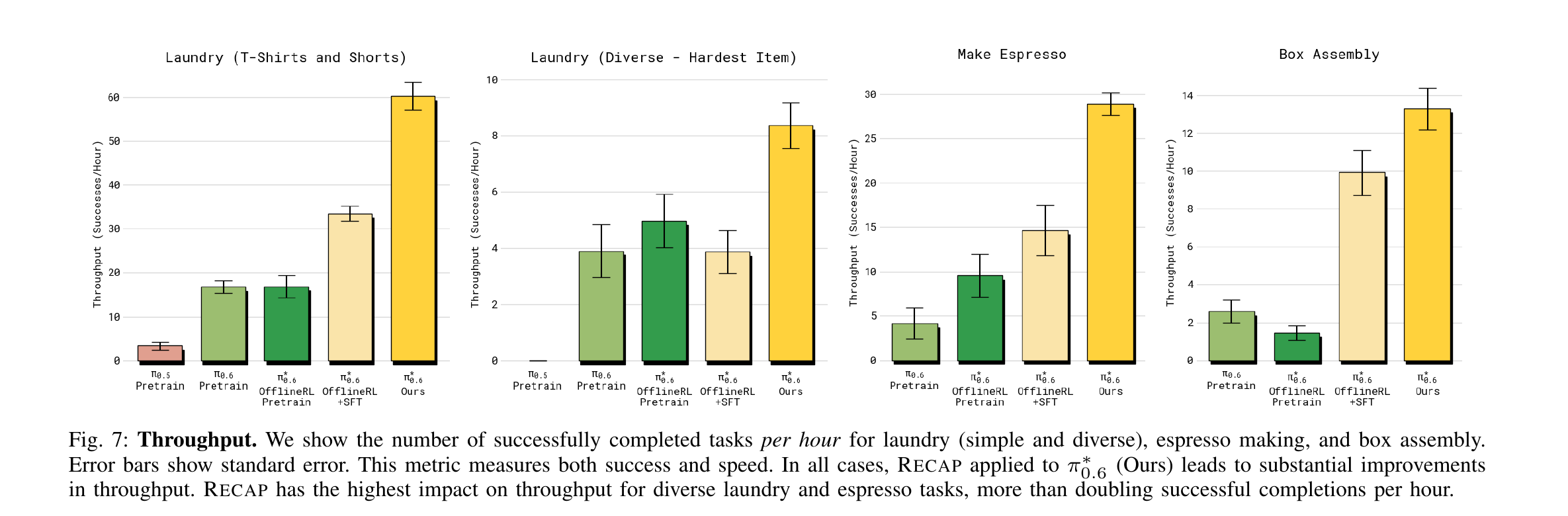
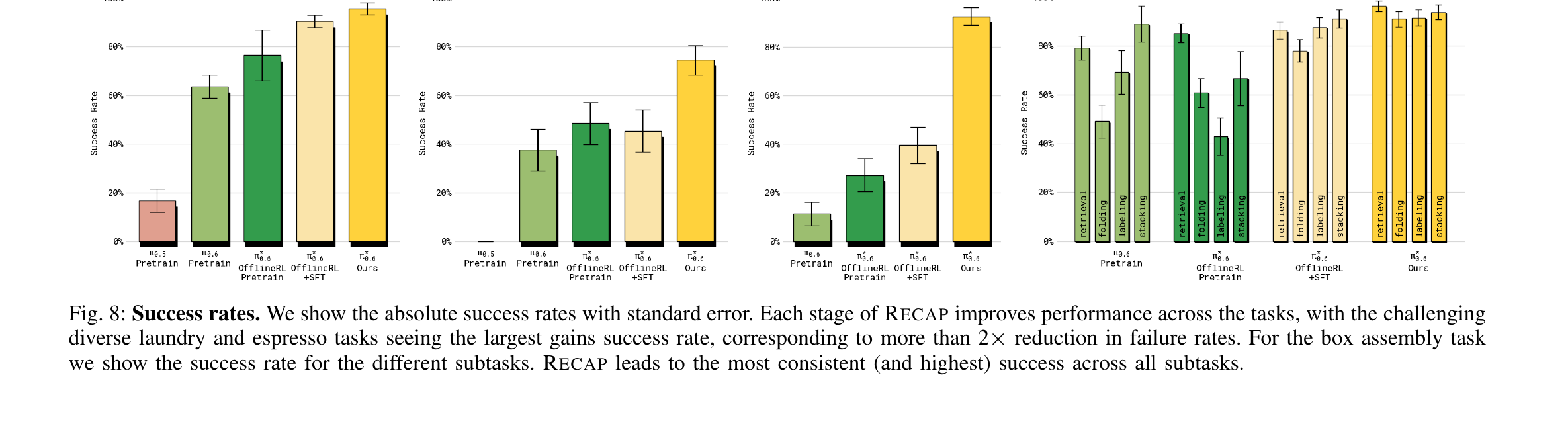
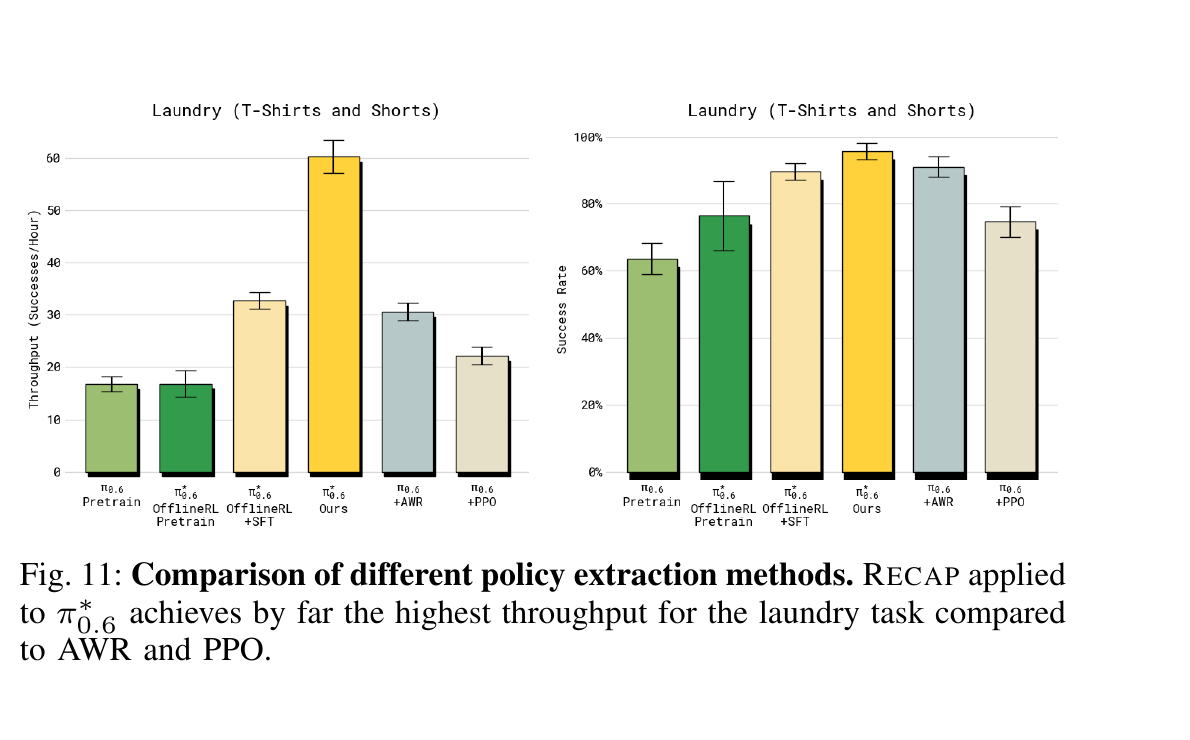
| 方法(自左向右) | 含义 |
| π₀.₅ Pretrain | 旧基线 |
| π₀.₆ Pretrain | 更大基模型,不 用 RECAP |
| π*₀.₆ OfflineRL Pretrain | π₀.₆ + advantage conditioning,但只用 demo 数据 |
| π*₀.₆ OfflineRL + SFT | + 任务示教 SFT 微调 |
| π*₀.₆ Ours | + RECAP 迭代(autonomous + interventions)= 完整方法 |
8.2 迭代式提升(Fig 9 / Fig 10)
8.3 vs AWR / PPO(Fig 11)
8.4 移除特定失败模式(Fig 12)
- Espresso · 13 小时不间断:在咖啡店连续做 espresso 13h,无人工干预。
- Laundry · 2 小时折新衣:在新家折叠未见过的衣服 2h,零中断。
- Box assembly · 工厂 deployment:组装的纸箱用于真实工厂打包。
§9 收获 · 局限 · 与 π₀.₅ 的对照
把整篇论文压缩成一张总结卡片——你应该带走什么、它没解决什么、它和 π₀.₅ 在开源生态上的关系。
9.1 三条 takeaway
过去 RL on VLA 的难点是没有可计算的 log π。RECAP 把"这个动作好不好" 从 loss 里挪到 prompt 里,绕过 likelihood,用纯 SL 完成 RL 改进。 这条思路对所有 likelihood-free 的生成式模型(diffusion / flow / EBM)都有借鉴意义。
最终训练数据 = 多机器人示教 + autonomous rollouts + human interventions。 其中 interventions 是少量 + 高价值——只在模型犯错时介入,几百条就够大幅改善。 这比"先采几千条新数据再 SFT" 经济得多。
把回报离散成 201 bin、用 cross-entropy 训——比单 scalar 回归稳定。 Fig 4 显示 VF 学到的不只是终态,还有子任务进度,这是 advantage 能 work 的物理依据。
9.2 局限(论文 §VII 自己承认)
| 不自主 | 仍依赖人做 reward labeling、interventions、episode resets。完全 hands-off 还做不到。 |
| 探索很弱 | 只靠 policy stochasticity 和 human interventions 做"探索"。如果初始策略完全偏离,RECAP 救不回来。 |
| Offline 风格的 RL loop | 不是 fully online——仍是"采一批 → 训一遍 → 再采"。online 版本是 future work。 |
| 只在一台双臂上验证迭代提升 | pre-training 跨多本体;但 RECAP 迭代实验全在静态双臂上完成,跨本体迭代未做。 |
9.3 对照 π₀.₅ · openpi 开源什么
π₀.₅ 在 openpi
里以 Pi0Config(pi05=True) 开放了架构。
π*₀.₆ / RECAP 截至本文发布未开源——只有 blog post + 论文。
可以预期跟随 π₀.₅ 的节奏,架构(advantage token 的位置 + VF 模型骨架)会进 openpi,
但训练 recipe(VF 训练、advantage 阈值、intervention 数据 pipeline)大概率不会公开。
| 组件 | π₀.₅ 状态 | π*₀.₆ 预期 | 说明 |
| VLA 架构(含 adv token) | 开源(pi05 flag) | 可能开 | 只是多一个 prompt token |
| Action Expert 860M 权重 | 无(仅 π₀ 老权重) | 几乎不会 | 商业核心 |
| VF 模型代码 | — | 可能开骨架 | distributional head 标准做法 |
| VF 权重 | — | 几乎不会 | 同上 |
| RECAP 训练 loop | — | 几乎不会 | 含真机数据 pipeline |
| 真机 rollouts / interventions 数据 | — | 几乎不会 | 商业资产 |
📄 原文:pi0.6.pdf · 🌐 Blog:pistar06 · 🔗 前作:π₀.₅ Open-World · π₀ VLA